RF-DETR: Real-Time SOTA Object Detection, Instance Segmentation, and Keypoint Detection¶
RF-DETR is a real-time transformer architecture for object detection, instance segmentation, and keypoint detection (preview) developed by Roboflow. Built on a DINOv2 vision transformer backbone, RF-DETR achieves state-of-the-art accuracy–latency trade-offs: RF-DETR-L reaches 56.5 AP50:95 on COCO at 6.8 ms (NVIDIA T4, TensorRT FP16), and RF-DETR-2XL achieves 60.1 AP50:95 — the first real-time model to exceed 60 AP on COCO. Accepted at ICLR 2026.
RF-DETR uses a DINOv2 vision transformer backbone and supports object detection, instance segmentation, and keypoint detection (preview) in a single, consistent API. Core models (Nano through Large) and all code are released under the Apache 2.0 license; XL and 2XLarge detection models require rfdetr[plus] and are provided under PML 1.0.
Developed by Isaac Robinson, Peter Robicheaux, Matvei Popov, Deva Ramanan (CMU), and Neehar Peri (CMU) at Roboflow. If you use RF-DETR in your research, please cite:
@inproceedings{robinson2026rfdetr,
title = {RF-DETR: Real-Time Detection Transformer},
author = {Robinson, Isaac and Robicheaux, Peter and Popov, Matvei and Ramanan, Deva and Peri, Neehar},
booktitle = {International Conference on Learning Representations (ICLR)},
year = {2026},
url = {https://arxiv.org/abs/2511.09554}
}
Install¶
You can install and use rfdetr in a Python>=3.10 environment. For detailed installation instructions, including installing from source, and setting up a local development environment, check out our install page.
Quickstart¶
Tutorials¶
-
Train RF-DETR on a Custom Dataset. Video

End to end walkthrough of training RF-DETR on a custom dataset.
-
Deploy RF-DETR to NVIDIA Jetson. Article
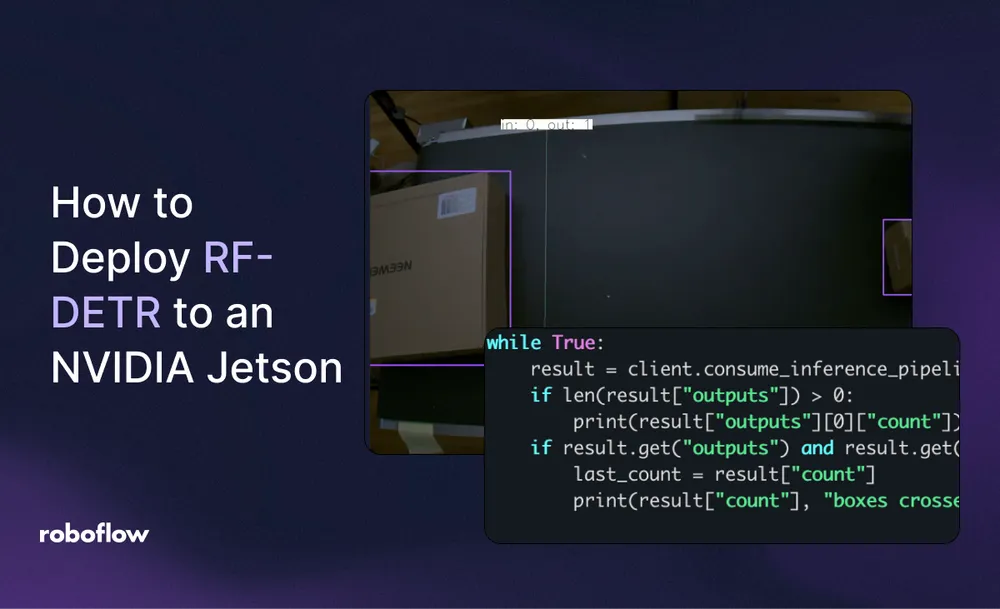
Instructions for deploying RF-DETR on NVIDIA Jetson with Roboflow Inference.
-
Train and Deploy RF-DETR with Roboflow
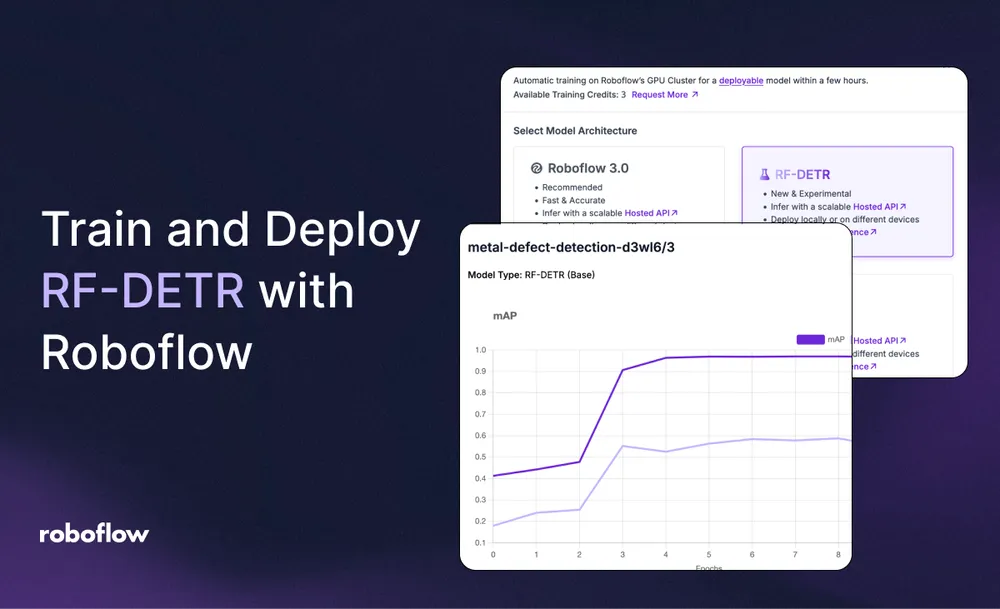
Cloud training and hardware deployment workflow using Roboflow.
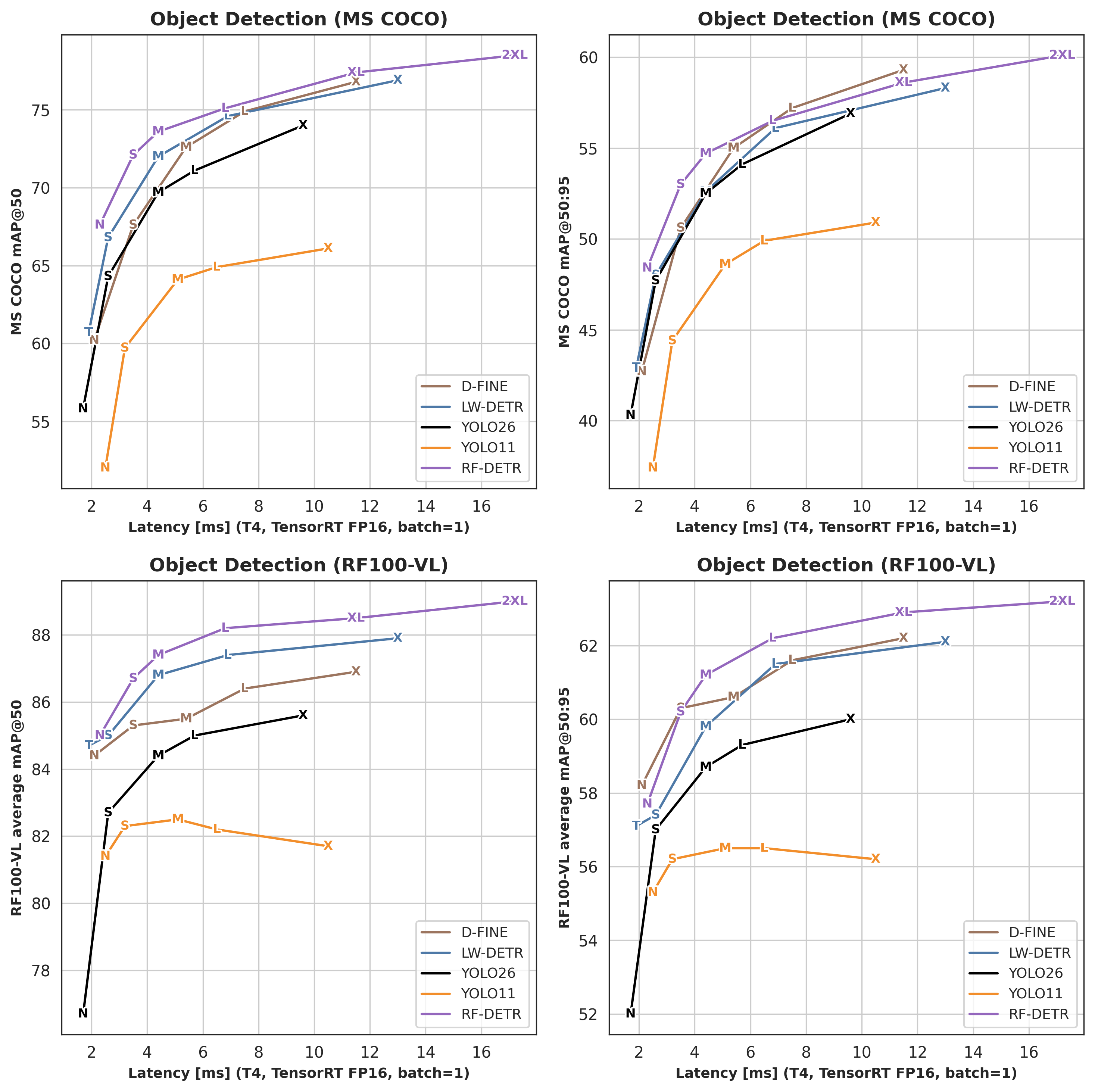
Benchmarks¶
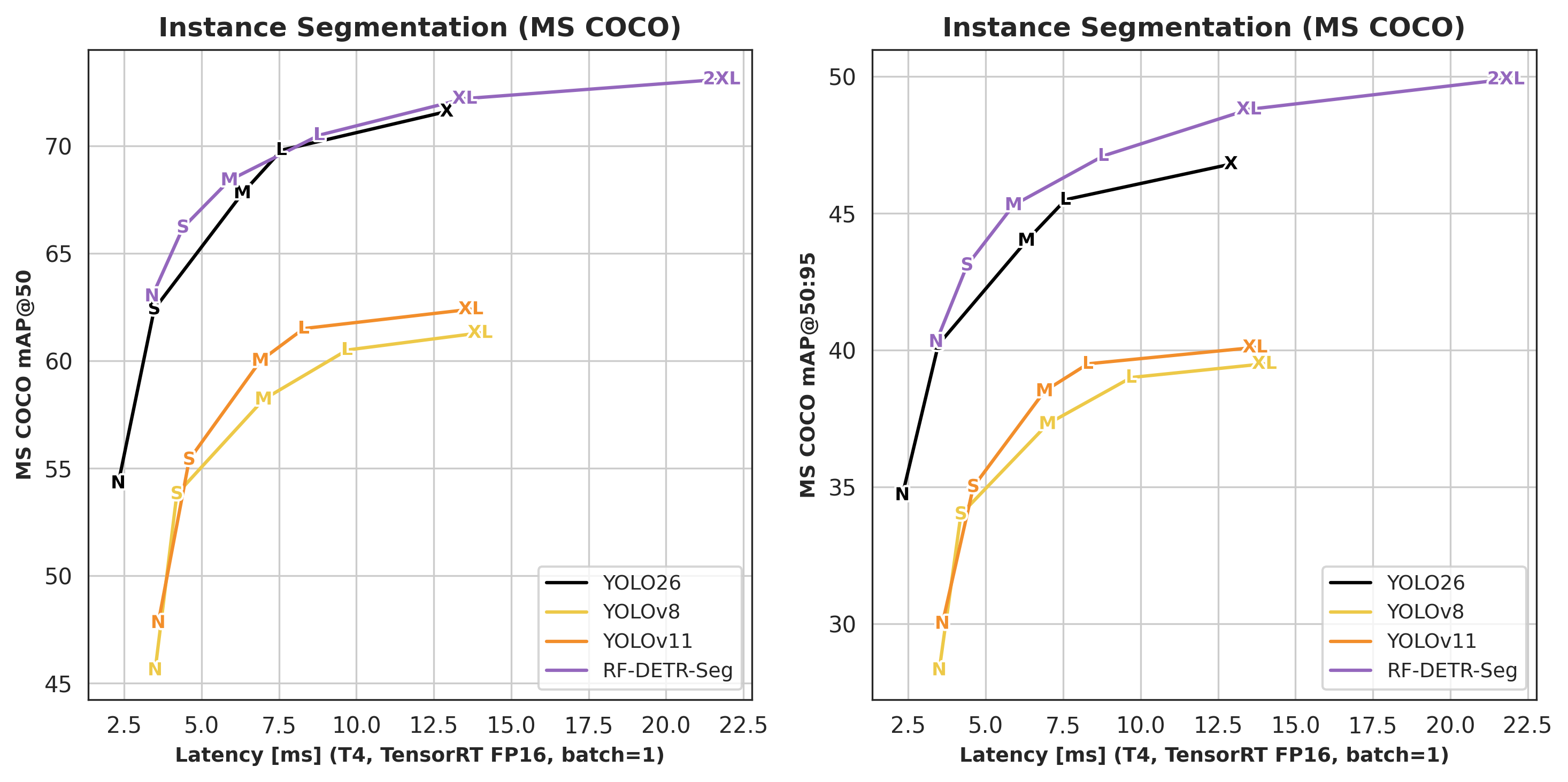
RF-DETR achieves the best accuracy–latency trade-off among real-time object detection and instance segmentation models. It also provides keypoint detection (preview) on COCO person keypoints. For detailed benchmark tables and methodology, check out our benchmarks page.
Detection¶
| Architecture | COCO AP50 | COCO AP50:95 | RF100VL AP50 | RF100VL AP50:95 | Latency (ms) | Params (M) | Resolution |
|---|---|---|---|---|---|---|---|
| RF-DETR-N | 67.6 | 48.4 | 85.0 | 57.7 | 2.3 | 30.5 | 384×384 |
| RF-DETR-S | 72.1 | 53.0 | 86.7 | 60.2 | 3.5 | 32.1 | 512×512 |
| RF-DETR-M | 73.6 | 54.7 | 87.4 | 61.2 | 4.4 | 33.7 | 576×576 |
| RF-DETR-L | 75.1 | 56.5 | 88.2 | 62.2 | 6.8 | 33.9 | 704×704 |
| RF-DETR-XL | 77.4 | 58.6 | 88.5 | 62.9 | 11.5 | 126.4 | 700×700 |
| RF-DETR-2XL | 78.5 | 60.1 | 89.0 | 63.2 | 17.2 | 126.9 | 880×880 |
Segmentation¶
| Architecture | COCO AP50 | COCO AP50:95 | Latency (ms) | Params (M) | Resolution |
|---|---|---|---|---|---|
| RF-DETR-Seg-N | 63.0 | 40.3 | 3.4 | 33.6 | 312×312 |
| RF-DETR-Seg-S | 66.2 | 43.1 | 4.4 | 33.7 | 384×384 |
| RF-DETR-Seg-M | 68.4 | 45.3 | 5.9 | 35.7 | 432×432 |
| RF-DETR-Seg-L | 70.5 | 47.1 | 8.8 | 36.2 | 504×504 |
| RF-DETR-Seg-XL | 72.2 | 48.8 | 13.5 | 38.1 | 624×624 |
| RF-DETR-Seg-2XL | 73.1 | 49.9 | 21.8 | 38.6 | 768×768 |
Keypoints¶
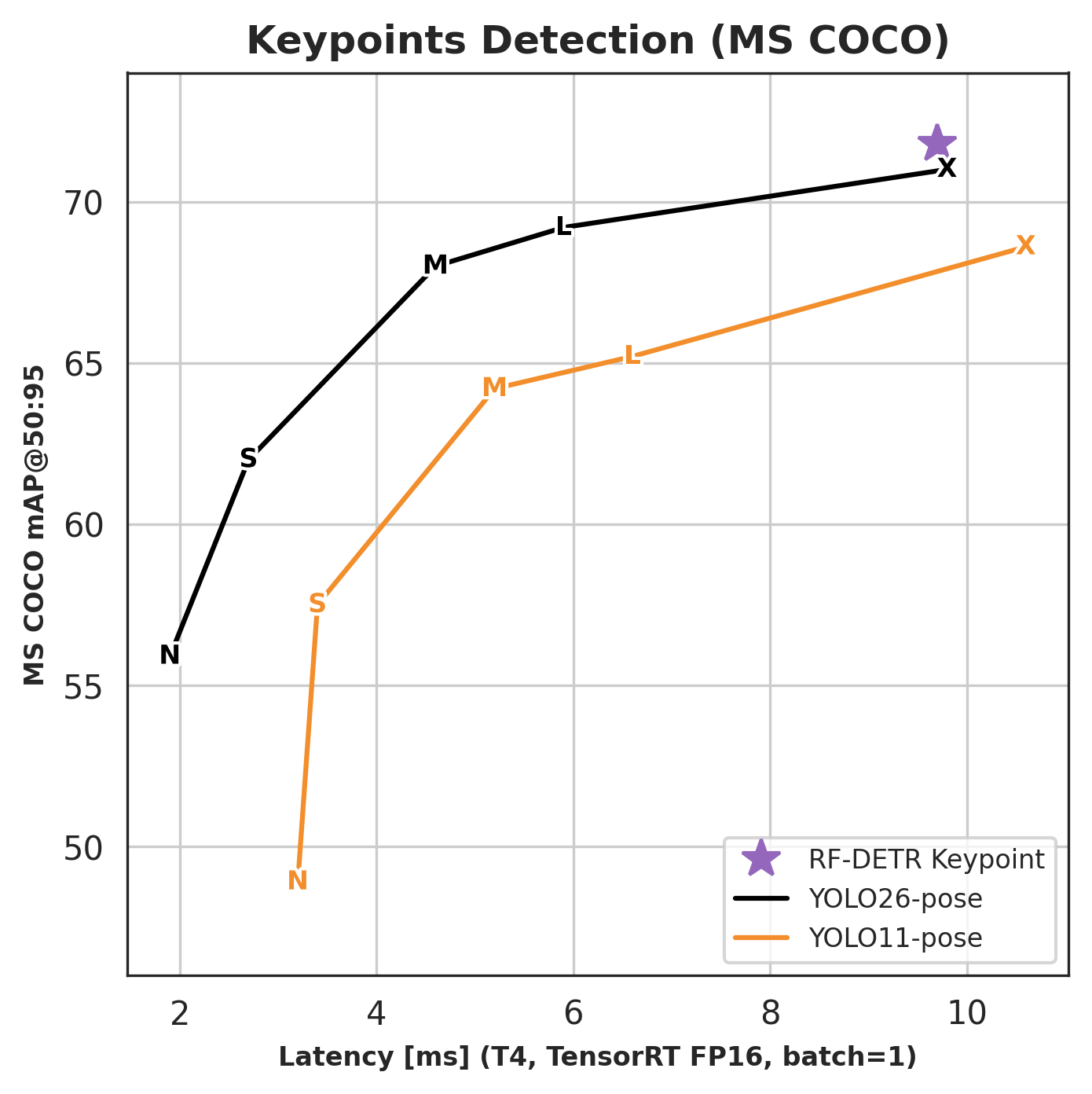
| Architecture | COCO AP50:95 | Latency (ms) | Params (M) | Resolution |
|---|---|---|---|---|
| RF-DETR Keypoint (Preview) | 71.8 | 9.7 | 126.4 | 576×576 |
Keypoint benchmarks report AP50:95 (OKS-based); this is the standard COCO keypoint comparison metric. For the full competitor comparison (YOLO11-pose, YOLO26-pose), see the Benchmarks page.
Frequently Asked Questions¶
What is RF-DETR? RF-DETR (Roboflow Detection Transformer) is a real-time object detection and instance segmentation model from Roboflow, accepted at ICLR 2026. It uses a DINOv2 vision transformer backbone and achieves state-of-the-art accuracy–latency trade-offs on COCO (60.1 AP50:95 for RF-DETR-2XL) and RF100-VL.
How does RF-DETR compare to YOLOv11? RF-DETR-L achieves 56.5 AP50:95 on COCO at 6.8 ms latency on an NVIDIA T4, outperforming YOLOv11x (50.9 AP) at lower latency. The DINOv2 backbone gives RF-DETR stronger performance on domain-shift benchmarks such as RF100-VL.
What GPU is required to train RF-DETR? A CUDA-capable GPU with at least 8 GB VRAM (e.g., NVIDIA RTX 3060, T4, A10) is recommended for fine-tuning. Smaller models (RF-DETR-N and RF-DETR-S) can fit in 6 GB VRAM with reduced batch size. CPU inference is supported for evaluation.
Which dataset formats does RF-DETR support?
RF-DETR supports COCO JSON and YOLO-format datasets (with dataset_file: "yolo"). Roboflow datasets export directly to both formats. Detection and segmentation datasets use the same format — the model variant determines the task.
Can RF-DETR run in real time? Yes. RF-DETR-N runs at 2.3 ms per frame on a T4 GPU (TensorRT FP16, batch 1), and RF-DETR-L at 6.8 ms — both well within real-time thresholds. ONNX and TFLite exports are available for edge deployment.
What is the difference between RF-DETR detection and segmentation models?
Detection models (e.g., RFDETRLarge) output bounding boxes. Segmentation models (e.g., RFDETRSegLarge) additionally output instance masks. Both share the same backbone and training API; segmentation adds a mask head and requires COCO-format segmentation annotations.
Does RF-DETR support keypoint detection?
RF-DETR Keypoint (Preview) detects 17 body keypoints per person on COCO, achieving 71.8 AP50:95 at 9.7 ms on NVIDIA T4. It is available in the rfdetr package as RFDETRKeypointPreview. See Run Keypoint Models for usage.
Is RF-DETR open source?
Yes. Core models (Nano through Large) and all training/inference code are released under the Apache 2.0 license. XLarge and 2XLarge models require the rfdetr[plus] package (PML 1.0 license).
How do I fine-tune RF-DETR on a custom dataset?
Instantiate a model and call model.train(...) with your dataset directory in COCO JSON or YOLO format. Example: model = RFDETRLarge(); model.train(dataset_dir='./dataset', epochs=50, batch_size=4). The model downloads pretrained weights automatically and saves best checkpoints automatically (use resume= to continue from one).
How do I export RF-DETR to ONNX or TensorRT?
Call model.export(format="onnx") after training or loading a checkpoint. ONNX export works on CPU and produces a single .onnx file compatible with ONNX Runtime and OpenCV DNN. For TensorRT deployment, use model.export(format="tensorrt"), which exports ONNX and then builds a .trt engine in-process via the TensorRT Python API; this requires pip install rfdetr[tensorrt] and a CUDA GPU.
Which RF-DETR model size should I use? RF-DETR-Nano (2.3 ms, 67.6 AP50 on COCO) is best for edge and real-time applications. RF-DETR-Large (6.8 ms, 56.5 AP50:95) offers the best accuracy–latency trade-off for server deployment. RF-DETR-2XLarge (17.2 ms, 60.1 AP50:95) maximizes accuracy when latency allows.
Checkpoint note: Current
RFDETRLargedefaults torf-detr-large-2026.pth. The olderrf-detr-large.pthcheckpoint is a legacy Large release kept for backward compatibility and has been superseded by the current release.